
本教程源代码目录在book/image_classification, 初次使用请参考PaddlePaddle安装教程。
背景介绍
图像相比文字能够提供更加生动、容易理解及更具艺术感的信息,是人们转递与交换信息的重要来源。在本教程中,我们专注于图像识别领域的一个重要问题,即图像分类。
图像分类是根据图像的语义信息将不同类别图像区分开来,是计算机视觉中重要的基本问题,也是图像检测、图像分割、物体跟踪、行为分析等其他高层视觉任务的基础。图像分类在很多领域有广泛应用,包括安防领域的人脸识别和智能视频分析等,交通领域的交通场景识别,互联网领域基于内容的图像检索和相册自动归类,医学领域的图像识别等。
一般来说,图像分类通过手工特征或特征学习方法对整个图像进行全部描述,然后使用分类器判别物体类别,因此如何提取图像的特征至关重要。在深度学习算法之前使用较多的是基于词袋(Bag of Words)模型的物体分类方法。词袋方法从自然语言处理中引入,即一句话可以用一个装了词的袋子表示其特征,袋子中的词为句子中的单词、短语或字。对于图像而言,词袋方法需要构建字典。最简单的词袋模型框架可以设计为底层特征抽取、特征编码、分类器设计三个过程。
而基于深度学习的图像分类方法,可以通过有监督或无监督的方式学习层次化的特征描述,从而取代了手工设计或选择图像特征的工作。深度学习模型中的卷积神经网络(Convolution Neural Network, CNN)近年来在图像领域取得了惊人的成绩,CNN直接利用图像像素信息作为输入,最大程度上保留了输入图像的所有信息,通过卷积操作进行特征的提取和高层抽象,模型输出直接是图像识别的结果。这种基于"输入-输出"直接端到端的学习方法取得了非常好的效果,得到了广泛的应用。
本教程主要介绍图像分类的深度学习模型,以及如何使用PaddlePaddle训练CNN模型。
效果展示
图像分类包括通用图像分类、细粒度图像分类等。图1展示了通用图像分类效果,即模型可以正确识别图像上的主要物体。
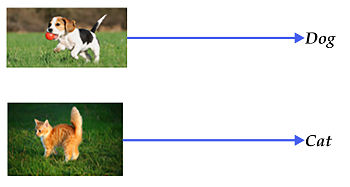
图1. 通用图像分类展示
图2展示了细粒度图像分类-花卉识别的效果,要求模型可以正确识别花的类别。

图2. 细粒度图像分类展示
一个好的模型既要对不同类别识别正确,同时也应该能够对不同视角、光照、背景、变形或部分遮挡的图像正确识别(这里我们统一称作图像扰动)。图3展示了一些图像的扰动,较好的模型会像聪明的人类一样能够正确识别。
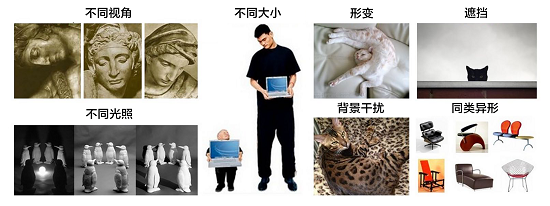
图3. 扰动图片展示[22]
模型概览
图像识别领域大量的研究成果都是建立在PASCAL VOC、ImageNet等公开的数据集上,很多图像识别算法通常在这些数据集上进行测试和比较。PASCAL VOC是2005年发起的一个视觉挑战赛,ImageNet是2010年发起的大规模视觉识别竞赛(ILSVRC)的数据集,在本章中我们基于这些竞赛的一些论文介绍图像分类模型。
在2012年之前的传统图像分类方法可以用背景描述中提到的三步完成,但通常完整建立图像识别模型一般包括底层特征学习、特征编码、空间约束、分类器设计、模型融合等几个阶段。
1). 底层特征提取: 通常从图像中按照固定步长、尺度提取大量局部特征描述。常用的局部特征包括SIFT(Scale-Invariant Feature Transform, 尺度不变特征转换) [1]、HOG(Histogram of Oriented Gradient, 方向梯度直方图) [2]、LBP(Local Bianray Pattern, 局部二值模式) [3] 等,一般也采用多种特征描述子,防止丢失过多的有用信息。
2). 特征编码: 底层特征中包含了大量冗余与噪声,为了提高特征表达的鲁棒性,需要使用一种特征变换算法对底层特征进行编码,称作特征编码。常用的特征编码包括向量量化编码 [4]、稀疏编码 [5]、局部线性约束编码 [6]、Fisher向量编码 [7] 等。
3). 空间特征约束: 特征编码之后一般会经过空间特征约束,也称作特征汇聚。特征汇聚是指在一个空间范围内,对每一维特征取最大值或者平均值,可以获得一定特征不变形的特征表达。金字塔特征匹配是一种常用的特征聚会方法,这种方法提出将图像均匀分块,在分块内做特征汇聚。
4). 通过分类器分类: 经过前面步骤之后一张图像可以用一个固定维度的向量进行描述,接下来就是经过分类器对图像进行分类。通常使用的分类器包括SVM(Support Vector Machine, 支持向量机)、随机森林等。而使用核方法的SVM是最为广泛的分类器,在传统图像分类任务上性能很好。
这种方法在PASCAL VOC竞赛中的图像分类算法中被广泛使用 [18]。NEC实验室在ILSVRC2010中采用SIFT和LBP特征,两个非线性编码器以及SVM分类器获得图像分类的冠军 [8]。
Alex Krizhevsky在2012年ILSVRC提出的CNN模型 [9] 取得了历史性的突破,效果大幅度超越传统方法,获得了ILSVRC2012冠军,该模型被称作AlexNet。这也是首次将深度学习用于大规模图像分类中。从AlexNet之后,涌现了一系列CNN模型,不断地在ImageNet上刷新成绩,如图4展示。随着模型变得越来越深以及精妙的结构设计,Top-5的错误率也越来越低,降到了3.5%附近。而在同样的ImageNet数据集上,人眼的辨识错误率大概在5.1%,也就是目前的深度学习模型的识别能力已经超过了人眼。
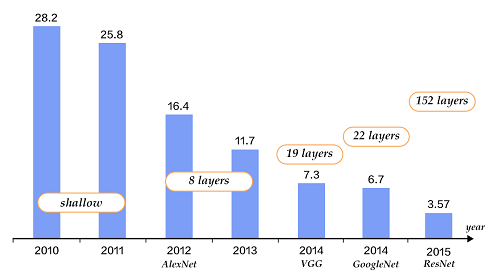
图4. ILSVRC图像分类Top-5错误率
CNN
传统CNN包含卷积层、全连接层等组件,并采用softmax多类别分类器和多类交叉熵损失函数,一个典型的卷积神经网络如图5所示,我们先介绍用来构造CNN的常见组件。
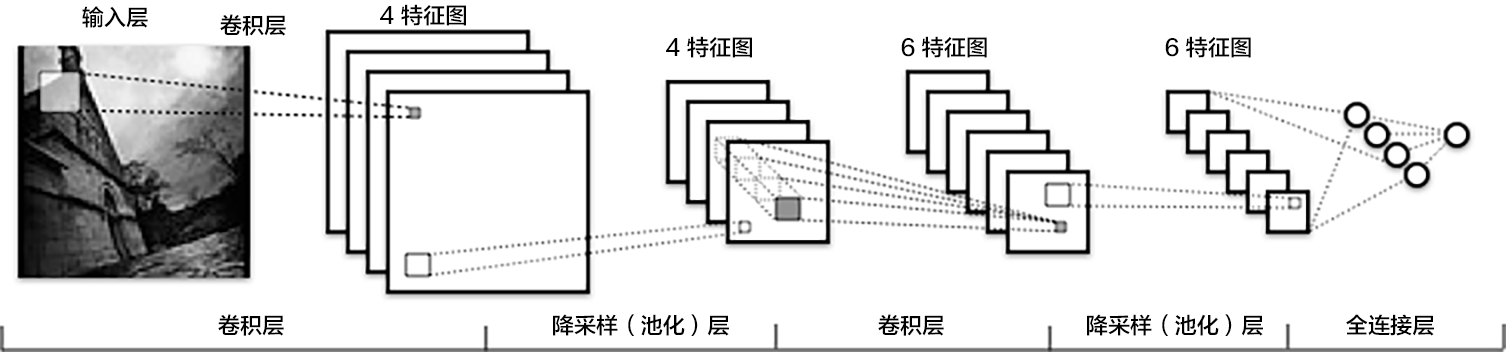
图5. CNN网络示例[20]
卷积层(convolution layer): 执行卷积操作提取底层到高层的特征,发掘出图片局部关联性质和空间不变性质。
池化层(pooling layer): 执行降采样操作。通过取卷积输出特征图中局部区块的最大值(max-pooling)或者均值(avg-pooling)。降采样也是图像处理中常见的一种操作,可以过滤掉一些不重要的高频信息。
全连接层(fully-connected layer,或者fc layer): 输入层到隐藏层的神经元是全部连接的。
非线性变化: 卷积层、全连接层后面一般都会接非线性变化层,例如Sigmoid、Tanh、ReLu等来增强网络的表达能力,在CNN里最常使用的为ReLu激活函数。
Dropout [10] : 在模型训练阶段随机让一些隐层节点权重不工作,提高网络的泛化能力,一定程度上防止过拟合。
另外,在训练过程中由于每层参数不断更新,会导致下一次输入分布发生变化,这样导致训练过程需要精心设计超参数。如2015年Sergey Ioffe和Christian Szegedy提出了Batch Normalization (BN)算法 [14] 中,每个batch对网络中的每一层特征都做归一化,使得每层分布相对稳定。BN算法不仅起到一定的正则作用,而且弱化了一些超参数的设计。经过实验证明,BN算法加速了模型收敛过程,在后来较深的模型中被广泛使用。
接下来我们主要介绍VGG,GoogleNet和ResNet网络结构。
VGG
牛津大学VGG(Visual Geometry Group)组在2014年ILSVRC提出的模型被称作VGG模型 [11] 。该模型相比以往模型进一步加宽和加深了网络结构,它的核心是五组卷积操作,每两组之间做Max-Pooling空间降维。同一组内采用多次连续的3X3卷积,卷积核的数目由较浅组的64增多到最深组的512,同一组内的卷积核数目是一样的。卷积之后接两层全连接层,之后是分类层。由于每组内卷积层的不同,有11、13、16、19层这几种模型,下图展示一个16层的网络结构。VGG模型结构相对简洁,提出之后也有很多文章基于此模型进行研究,如在ImageNet上首次公开超过人眼识别的模型[19]就是借鉴VGG模型的结构。
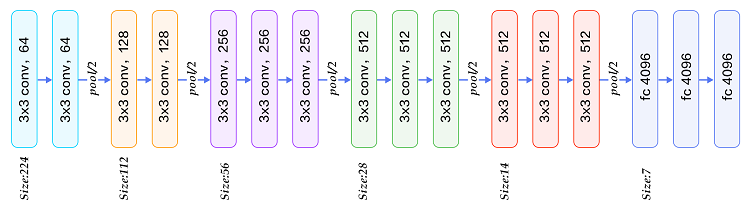
图6. 基于ImageNet的VGG16模型
GoogleNet
GoogleNet [12] 在2014年ILSVRC的获得了冠军,在介绍该模型之前我们先来了解NIN(Network in Network)模型 [13] 和Inception模块,因为GoogleNet模型由多组Inception模块组成,模型设计借鉴了NIN的一些思想。
NIN模型主要有两个特点:1) 引入了多层感知卷积网络(Multi-Layer Perceptron Convolution, MLPconv)代替一层线性卷积网络。MLPconv是一个微小的多层卷积网络,即在线性卷积后面增加若干层1x1的卷积,这样可以提取出高度非线性特征。2) 传统的CNN最后几层一般都是全连接层,参数较多。而NIN模型设计最后一层卷积层包含类别维度大小的特征图,然后采用全局均值池化(Avg-Pooling)替代全连接层,得到类别维度大小的向量,再进行分类。这种替代全连接层的方式有利于减少参数。
Inception模块如下图7所示,图(a)是最简单的设计,输出是3个卷积层和一个池化层的特征拼接。这种设计的缺点是池化层不会改变特征通道数,拼接后会导致特征的通道数较大,经过几层这样的模块堆积后,通道数会越来越大,导致参数和计算量也随之增大。为了改善这个缺点,图(b)引入3个1x1卷积层进行降维,所谓的降维就是减少通道数,同时如NIN模型中提到的1x1卷积也可以修正线性特征。
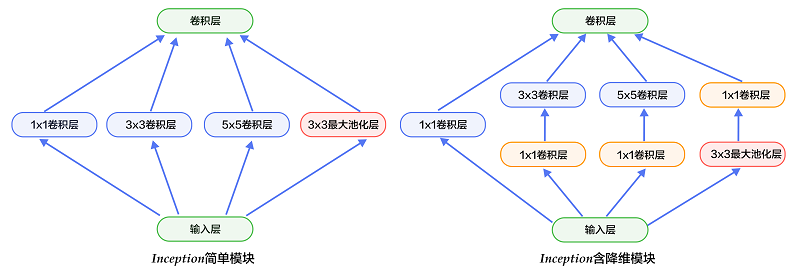
图7. Inception模块
GoogleNet由多组Inception模块堆积而成。另外,在网络最后也没有采用传统的多层全连接层,而是像NIN网络一样采用了均值池化层;但与NIN不同的是,池化层后面接了一层到类别数映射的全连接层。除了这两个特点之外,由于网络中间层特征也很有判别性,GoogleNet在中间层添加了两个辅助分类器,在后向传播中增强梯度并且增强正则化,而整个网络的损失函数是这个三个分类器的损失加权求和。
GoogleNet整体网络结构如图8所示,总共22层网络:开始由3层普通的卷积组成;接下来由三组子网络组成,第一组子网络包含2个Inception模块,第二组包含5个Inception模块,第三组包含2个Inception模块;然后接均值池化层、全连接层。
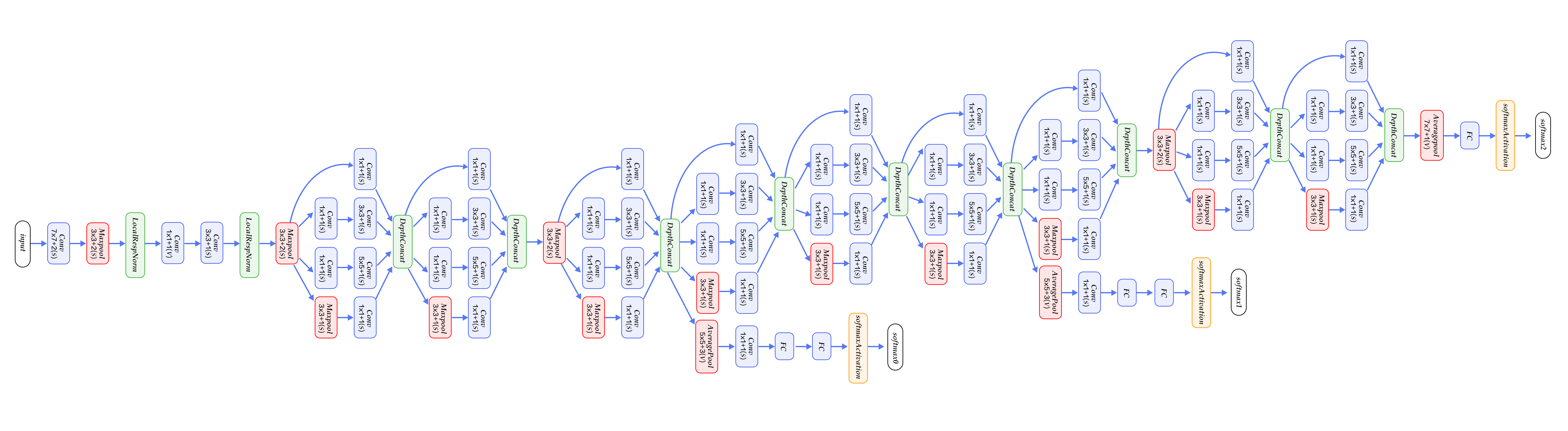
图8. GoogleNet[12]
上面介绍的是GoogleNet第一版模型(称作GoogleNet-v1)。GoogleNet-v2 [14] 引入BN层;GoogleNet-v3 [16] 对一些卷积层做了分解,进一步提高网络非线性能力和加深网络;GoogleNet-v4 [17] 引入下面要讲的ResNet设计思路。从v1到v4每一版的改进都会带来准确度的提升,介于篇幅,这里不再详细介绍v2到v4的结构。
ResNet
ResNet(Residual Network) [15] 是2015年ImageNet图像分类、图像物体定位和图像物体检测比赛的冠军。针对训练卷积神经网络时加深网络导致准确度下降的问题,ResNet提出了采用残差学习。在已有设计思路(BN, 小卷积核,全卷积网络)的基础上,引入了残差模块。每个残差模块包含两条路径,其中一条路径是输入特征的直连通路,另一条路径对该特征做两到三次卷积操作得到该特征的残差,最后再将两条路径上的特征相加。
残差模块如图9所示,左边是基本模块连接方式,由两个输出通道数相同的3x3卷积组成。右边是瓶颈模块(Bottleneck)连接方式,之所以称为瓶颈,是因为上面的1x1卷积用来降维(图示例即256->64),下面的1x1卷积用来升维(图示例即64->256),这样中间3x3卷积的输入和输出通道数都较小(图示例即64->64)。
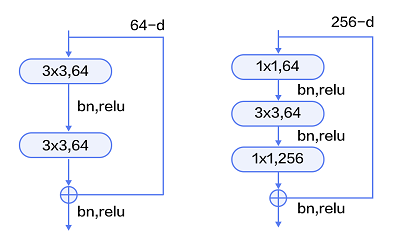
图9. 残差模块
图10展示了50、101、152层网络连接示意图,使用的是瓶颈模块。这三个模型的区别在于每组中残差模块的重复次数不同(见图右上角)。ResNet训练收敛较快,成功的训练了上百乃至近千层的卷积神经网络。
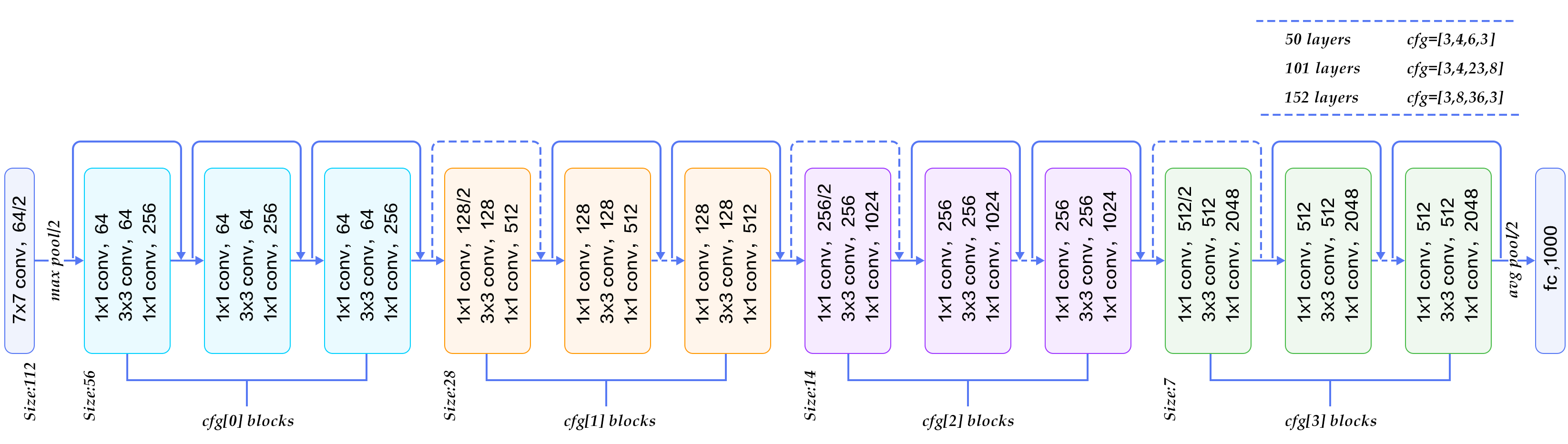
图10. 基于ImageNet的ResNet模型
数据准备
通用图像分类公开的标准数据集常用的有CIFAR、ImageNet、COCO等,常用的细粒度图像分类数据集包括CUB-200-2011、Stanford Dog、Oxford-flowers等。其中ImageNet数据集规模相对较大,如模型概览一章所讲,大量研究成果基于ImageNet。ImageNet数据从2010年来稍有变化,常用的是ImageNet-2012数据集,该数据集包含1000个类别:训练集包含1,281,167张图片,每个类别数据732至1300张不等,验证集包含50,000张图片,平均每个类别50张图片。
由于ImageNet数据集较大,下载和训练较慢,为了方便大家学习,我们使用">CIFAR10数据集。CIFAR10数据集包含60,000张32x32的彩色图片,10个类别,每个类包含6,000张。其中50,000张图片作为训练集,10000张作为测试集。图11从每个类别中随机抽取了10张图片,展示了所有的类别。
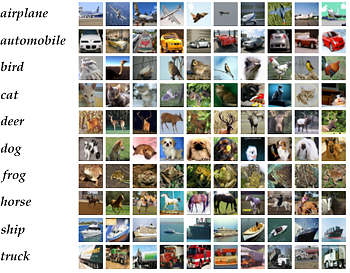
图11. CIFAR10数据集[21]
Paddle API提供了自动加载cifar数据集模块 paddle.dataset.cifar。
通过输入python train.py,就可以开始训练模型了,以下小节将详细介绍train.py的相关内容。
模型结构
Paddle 初始化
通过 paddle.init,初始化Paddle是否使用GPU,trainer的数目等等。
import sys
import gzip
import paddle.v2 as paddle
from vgg import vgg_bn_drop
from resnet import resnet_cifar10
# PaddlePaddle init
paddle.init(use_gpu=False, trainer_count=1)本教程中我们提供了VGG和ResNet两个模型的配置。
VGG
首先介绍VGG模型结构,由于CIFAR10图片大小和数量相比ImageNet数据小很多,因此这里的模型针对CIFAR10数据做了一定的适配。卷积部分引入了BN和Dropout操作。
-
定义数据输入及其维度
网络输入定义为
data_layer(数据层),在图像分类中即为图像像素信息。CIFRAR10是RGB 3通道32x32大小的彩色图,因此输入数据大小为3072(3x32x32),类别大小为10,即10分类。datadim = 3 * 32 * 32 classdim = 10 image = paddle.layer.data( name="image", type=paddle.data_type.dense_vector(datadim)) -
定义VGG网络核心模块
net = vgg_bn_drop(image)VGG核心模块的输入是数据层,
vgg_bn_drop定义了16层VGG结构,每层卷积后面引入BN层和Dropout层,详细的定义如下:def vgg_bn_drop(input): def conv_block(ipt, num_filter, groups, dropouts, num_channels=None): return paddle.networks.img_conv_group( input=ipt, num_channels=num_channels, pool_size=2, pool_stride=2, conv_num_filter=[num_filter] * groups, conv_filter_size=3, conv_act=paddle.activation.Relu(), conv_with_batchnorm=True, conv_batchnorm_drop_rate=dropouts, pool_type=paddle.pooling.Max()) conv1 = conv_block(input, 64, 2, [0.3, 0], 3) conv2 = conv_block(conv1, 128, 2, [0.4, 0]) conv3 = conv_block(conv2, 256, 3, [0.4, 0.4, 0]) conv4 = conv_block(conv3, 512, 3, [0.4, 0.4, 0]) conv5 = conv_block(conv4, 512, 3, [0.4, 0.4, 0]) drop = paddle.layer.dropout(input=conv5, dropout_rate=0.5) fc1 = paddle.layer.fc(input=drop, size=512, act=paddle.activation.Linear()) bn = paddle.layer.batch_norm( input=fc1, act=paddle.activation.Relu(), layer_attr=paddle.attr.Extra(drop_rate=0.5)) fc2 = paddle.layer.fc(input=bn, size=512, act=paddle.activation.Linear()) return fc22.1. 首先定义了一组卷积网络,即conv_block。卷积核大小为3x3,池化窗口大小为2x2,窗口滑动大小为2,groups决定每组VGG模块是几次连续的卷积操作,dropouts指定Dropout操作的概率。所使用的
img_conv_group是在paddle.networks中预定义的模块,由若干组 Conv->BN->ReLu->Dropout 和 一组 Pooling 组成。2.2. 五组卷积操作,即 5个conv_block。 第一、二组采用两次连续的卷积操作。第三、四、五组采用三次连续的卷积操作。每组最后一个卷积后面Dropout概率为0,即不使用Dropout操作。
2.3. 最后接两层512维的全连接。
-
定义分类器
通过上面VGG网络提取高层特征,然后经过全连接层映射到类别维度大小的向量,再通过Softmax归一化得到每个类别的概率,也可称作分类器。
out = paddle.layer.fc(input=net, size=classdim, act=paddle.activation.Softmax()) -
定义损失函数和网络输出
在有监督训练中需要输入图像对应的类别信息,同样通过
paddle.layer.data来定义。训练中采用多类交叉熵作为损失函数,并作为网络的输出,预测阶段定义网络的输出为分类器得到的概率信息。lbl = paddle.layer.data( name="label", type=paddle.data_type.integer_value(classdim)) cost = paddle.layer.classification_cost(input=out, label=lbl)
ResNet
ResNet模型的第1、3、4步和VGG模型相同,这里不再介绍。主要介绍第2步即CIFAR10数据集上ResNet核心模块。
net = resnet_cifar10(image, depth=56)先介绍resnet_cifar10中的一些基本函数,再介绍网络连接过程。
conv_bn_layer : 带BN的卷积层。
shortcut : 残差模块的"直连"路径,"直连"实际分两种形式:残差模块输入和输出特征通道数不等时,采用1x1卷积的升维操作;残差模块输入和输出通道相等时,采用直连操作。
basicblock : 一个基础残差模块,即图9左边所示,由两组3x3卷积组成的路径和一条"直连"路径组成。
bottleneck : 一个瓶颈残差模块,即图9右边所示,由上下1x1卷积和中间3x3卷积组成的路径和一条"直连"路径组成。
layer_warp : 一组残差模块,由若干个残差模块堆积而成。每组中第一个残差模块滑动窗口大小与其他可以不同,以用来减少特征图在垂直和水平方向的大小。
def conv_bn_layer(input,
ch_out,
filter_size,
stride,
padding,
active_type=paddle.activation.Relu(),
ch_in=None):
tmp = paddle.layer.img_conv(
input=input,
filter_size=filter_size,
num_channels=ch_in,
num_filters=ch_out,
stride=stride,
padding=padding,
act=paddle.activation.Linear(),
bias_attr=False)
return paddle.layer.batch_norm(input=tmp, act=active_type)
def shortcut(ipt, n_in, n_out, stride):
if n_in != n_out:
return conv_bn_layer(ipt, n_out, 1, stride, 0,
paddle.activation.Linear())
else:
return ipt
def basicblock(ipt, ch_out, stride):
ch_in = ch_out * 2
tmp = conv_bn_layer(ipt, ch_out, 3, stride, 1)
tmp = conv_bn_layer(tmp, ch_out, 3, 1, 1, paddle.activation.Linear())
short = shortcut(ipt, ch_in, ch_out, stride)
return paddle.layer.addto(input=[tmp, short], act=paddle.activation.Relu())
def layer_warp(block_func, ipt, features, count, stride):
tmp = block_func(ipt, features, stride)
for i in range(1, count):
tmp = block_func(tmp, features, 1)
return tmpresnet_cifar10 的连接结构主要有以下几个过程。
底层输入连接一层 conv_bn_layer,即带BN的卷积层。
然后连接3组残差模块即下面配置3组 layer_warp ,每组采用图 10 左边残差模块组成。
最后对网络做均值池化并返回该层。
注意:除过第一层卷积层和最后一层全连接层之外,要求三组 layer_warp 总的含参层数能够被6整除,即 resnet_cifar10 的 depth 要满足 $(depth - 2) % 6 == 0$ 。
def resnet_cifar10(ipt, depth=32):
# depth should be one of 20, 32, 44, 56, 110, 1202
assert (depth - 2) % 6 == 0
n = (depth - 2) / 6
nStages = {16, 64, 128}
conv1 = conv_bn_layer(
ipt, ch_in=3, ch_out=16, filter_size=3, stride=1, padding=1)
res1 = layer_warp(basicblock, conv1, 16, n, 1)
res2 = layer_warp(basicblock, res1, 32, n, 2)
res3 = layer_warp(basicblock, res2, 64, n, 2)
pool = paddle.layer.img_pool(
input=res3, pool_size=8, stride=1, pool_type=paddle.pooling.Avg())
return pool训练模型
定义参数
首先依据模型配置的cost定义模型参数。
# Create parameters
parameters = paddle.parameters.create(cost)可以打印参数名字,如果在网络配置中没有指定名字,则默认生成。
print parameters.keys()构造训练(Trainer)
根据网络拓扑结构和模型参数来构造出trainer用来训练,在构造时还需指定优化方法,这里使用最基本的Momentum方法,同时设定了学习率、正则等。
# Create optimizer
momentum_optimizer = paddle.optimizer.Momentum(
momentum=0.9,
regularization=paddle.optimizer.L2Regularization(rate=0.0002 * 128),
learning_rate=0.1 / 128.0,
learning_rate_decay_a=0.1,
learning_rate_decay_b=50000 * 100,
learning_rate_schedule='discexp')
# Create trainer
trainer = paddle.trainer.SGD(cost=cost,
parameters=parameters,
update_equation=momentum_optimizer)通过 learning_rate_decay_a (简写$a$) 、learning_rate_decay_b (简写$b$) 和 learning_rate_schedule 指定学习率调整策略,这里采用离散指数的方式调节学习率,计算公式如下, $n$ 代表已经处理过的累计总样本数,$lr_{0}$ 即为 settings 里设置的 learning_rate。
$$ lr = lr_{0} * a^ {\lfloor \frac{n}{ b}\rfloor} $$
训练
cifar.train10()每次产生一条样本,在完成shuffle和batch之后,作为训练的输入。
reader=paddle.batch(
paddle.reader.shuffle(
paddle.dataset.cifar.train10(), buf_size=50000),
batch_size=128)通过feeding来指定每一个数据和paddle.layer.data的对应关系。例如: cifar.train10()产生数据的第0列对应image层的特征。
feeding={'image': 0,
'label': 1}可以使用event_handler回调函数来观察训练过程,或进行测试等, 该回调函数是trainer.train函数里设定。
event_handler_plot可以用来利用回调数据来打点画图:
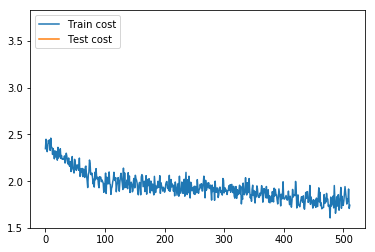
from paddle.v2.plot import Ploter
train_title = "Train cost"
test_title = "Test cost"
cost_ploter = Ploter(train_title, test_title)
step = 0
def event_handler_plot(event):
global step
if isinstance(event, paddle.event.EndIteration):
if step % 1 == 0:
cost_ploter.append(train_title, step, event.cost)
cost_ploter.plot()
step += 1
if isinstance(event, paddle.event.EndPass):
result = trainer.test(
reader=paddle.batch(
paddle.dataset.cifar.test10(), batch_size=128),
feeding=feeding)
cost_ploter.append(test_title, step, result.cost)event_handler 用来在训练过程中输出文本日志
# End batch and end pass event handler
def event_handler(event):
if isinstance(event, paddle.event.EndIteration):
if event.batch_id % 100 == 0:
print "\nPass %d, Batch %d, Cost %f, %s" % (
event.pass_id, event.batch_id, event.cost, event.metrics)
else:
sys.stdout.write('.')
sys.stdout.flush()
if isinstance(event, paddle.event.EndPass):
# save parameters
with gzip.open('params_pass_%d.tar.gz' % event.pass_id, 'w') as f:
parameters.to_tar(f)
result = trainer.test(
reader=paddle.batch(
paddle.dataset.cifar.test10(), batch_size=128),
feeding=feeding)
print "\nTest with Pass %d, %s" % (event.pass_id, result.metrics)通过trainer.train函数训练:
trainer.train(
reader=reader,
num_passes=200,
event_handler=event_handler_plot,
feeding=feeding)一轮训练log示例如下所示,经过1个pass, 训练集上平均error为0.6875 ,测试集上平均error为0.8852 。
Pass 0, Batch 0, Cost 2.473182, {'classification_error_evaluator': 0.9140625}
...................................................................................................
Pass 0, Batch 100, Cost 1.913076, {'classification_error_evaluator': 0.78125}
...................................................................................................
Pass 0, Batch 200, Cost 1.783041, {'classification_error_evaluator': 0.7421875}
...................................................................................................
Pass 0, Batch 300, Cost 1.668833, {'classification_error_evaluator': 0.6875}
..........................................................................................
Test with Pass 0, {'classification_error_evaluator': 0.885200023651123}图12是训练的分类错误率曲线图,运行到第200个pass后基本收敛,最终得到测试集上分类错误率为8.54%。
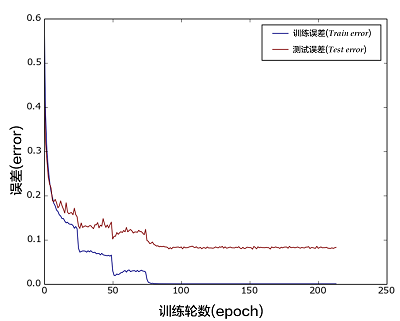
图12. CIFAR10数据集上VGG模型的分类错误率
应用模型
可以使用训练好的模型对图片进行分类,下面程序展示了如何使用paddle.infer接口进行推断,可以打开注释,更改加载的模型。
from PIL import Image
import numpy as np
import os
def load_image(file):
im = Image.open(file)
im = im.resize((32, 32), Image.ANTIALIAS)
im = np.array(im).astype(np.float32)
# PIL打开图片存储顺序为H(高度),W(宽度),C(通道)。
# PaddlePaddle要求数据顺序为CHW,所以需要转换顺序。
im = im.transpose((2, 0, 1)) # CHW
# CIFAR训练图片通道顺序为B(蓝),G(绿),R(红),
# 而PIL打开图片默认通道顺序为RGB,因为需要交换通道。
im = im[(2, 1, 0),:,:] # BGR
im = im.flatten()
im = im / 255.0
return im
test_data = []
cur_dir = os.path.dirname(os.path.realpath(__file__))
test_data.append((load_image(cur_dir + '/image/dog.png'),)
# with gzip.open('params_pass_50.tar.gz', 'r') as f:
# parameters = paddle.parameters.Parameters.from_tar(f)
probs = paddle.infer(
output_layer=out, parameters=parameters, input=test_data)
lab = np.argsort(-probs) # probs and lab are the results of one batch data
print "Label of image/dog.png is: %d" % lab[0][0]