
深度学习中7种最优化算法的可视化与理解
在深度学习中,有很多种优化算法,这些算法需要在极高维度(通常参数有数百万个以上)也即数百万维的空间进行梯度下降,从最开始的初始点开始,寻找最优化的参数,通常这一过程可能会遇到多种的情况,诸如:
1.提前遇到局部最小值从而卡住,再也找不到全局最小值了
2.遇到极为平坦的地方:“平原”,在这里梯度极小,经过多次迭代也无法离开。同理,鞍点也是一样的,在鞍点处,各方向的梯度极小,尽管沿着某一个方向稍微走一下就能离开。
3.“悬崖”,某个方向上参数的梯度可能突然变得奇大无比,在这个地方,梯度可能会造成难以预估的后果,可能让已经收敛的参数突然跑到极远地方去。
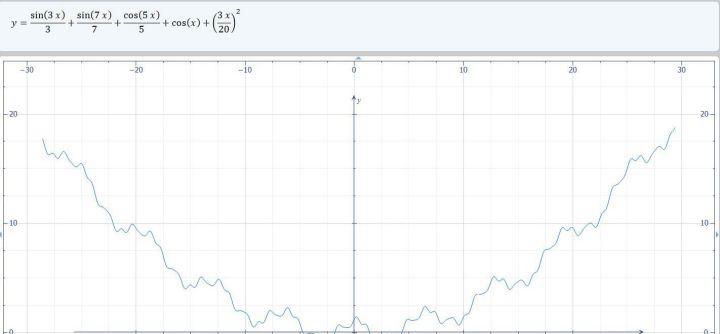
为了可视化&更好的理解这些优化算法,我首先拼出了一个很变态的一维函数:

其导数具有很简单的形式

具体长得像:
算法1:纯粹的梯度下降法
该算法很简单,表述如下:
首先给出学习率lr,初始x
while True:
x = x - lr*df/dx
根据学习率的不同,可以看到不同的效果。学习率过小,卡在局部极小值,学习率过大,压根不收敛。
 梯度下降法
梯度下降法
算法2:梯度下降法+动量
算法在纯粹的梯度下降法之上,外加了梯度,从而记录下了历史的梯度情况,从而减轻了卡在局部最小值的危险,在梯度=0的地方仍然会有一定的v剩余,从而在最小值附近摇摆
首先给出学习率lr,动量参数m
初始速度v=0,初始x
while True:
v = m * v - lr * df/dx
x += v
下面可以看图:
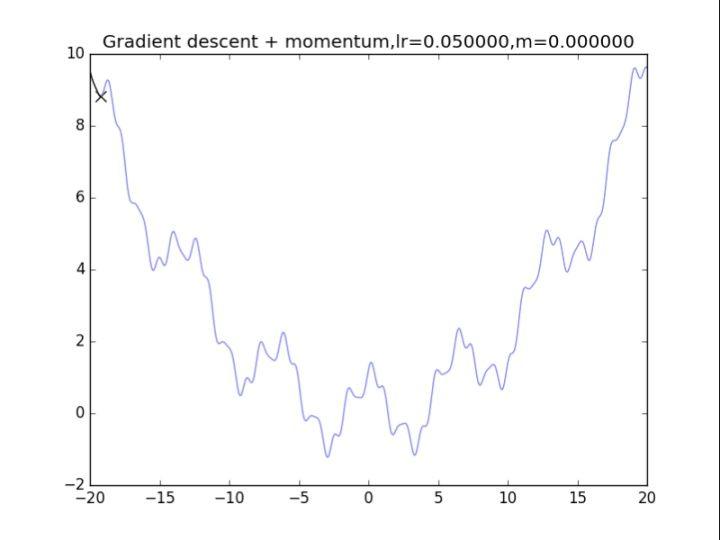 梯度下降+动量, lr=0.05
梯度下降+动量, lr=0.05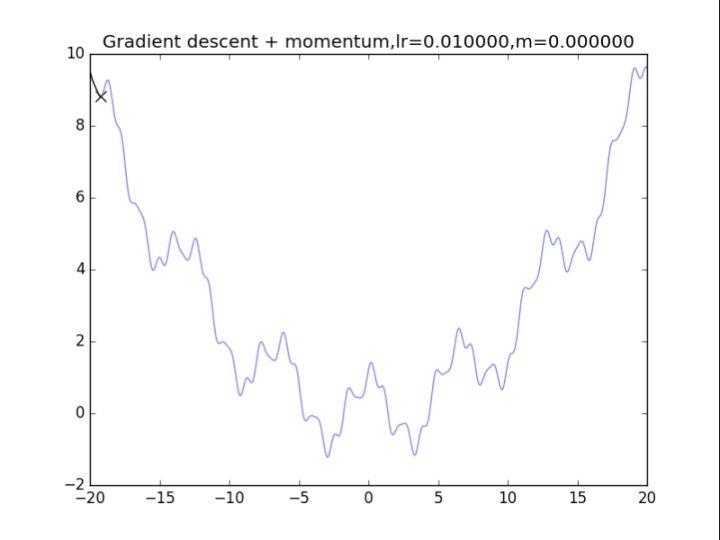 梯度下降+动量, lr=0.01
梯度下降+动量, lr=0.01 梯度下降+动量, lr=0.002
梯度下降+动量, lr=0.002
从中我们可以看出:
- lr越小越稳定,太大了很难收敛到最小值上,但是太小的话收敛就太慢了
- 动量参数不能太小,0.9以上表现比较好,但是又不能太大,太大了无法停留在最小值处
算法3:AdaGrad算法
AdaGrad算法的思想是累计历史上出现过的梯度(平方),用积累的梯度平方的总和的平方根,去逐元素地缩小现在的梯度。某种意义上是在自行缩小学习率,学习率的缩小与过去出现过的梯度有关。
缺点是:刚开始参数的梯度一般很大,但是算法在一开始就强力地缩小了梯度的大小,也称学习率的过早过量减少。
算法描述:
给出学习率lr,delta=1e-7
累计梯度r=0,初始x
while True:
g = df/dx
r = r + g*g
x = x - lr / (delta+ sqrt(r)) * g
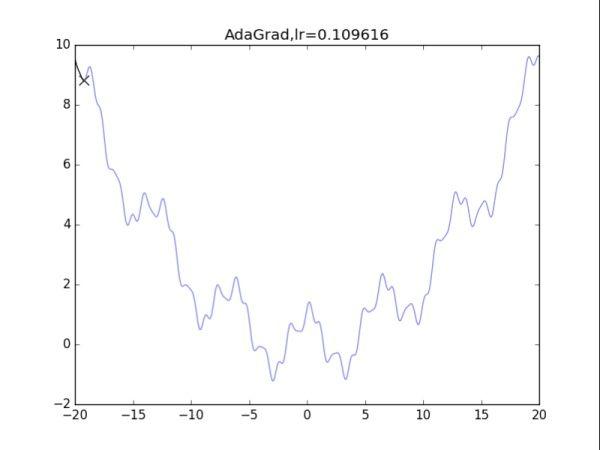
效果并不是很好......
算法4:RMSProp
AdaGrad算法在前期可能会有很大的梯度,自始至终都保留了下来,这会使得后期的学习率过小。RMSProp在这个基础之上,加入了平方梯度的衰减项,只能记录最近一段时间的梯度,在找到碗状区域时能够快速收敛。
算法描述:
给出学习率lr,delta=1e-6,衰减速率p
累计梯度r=0,初始x
while True:
g = df/dx
r = p*r + (1-p)*g*g
x = x - lr / (delta+ sqrt(r)) * g
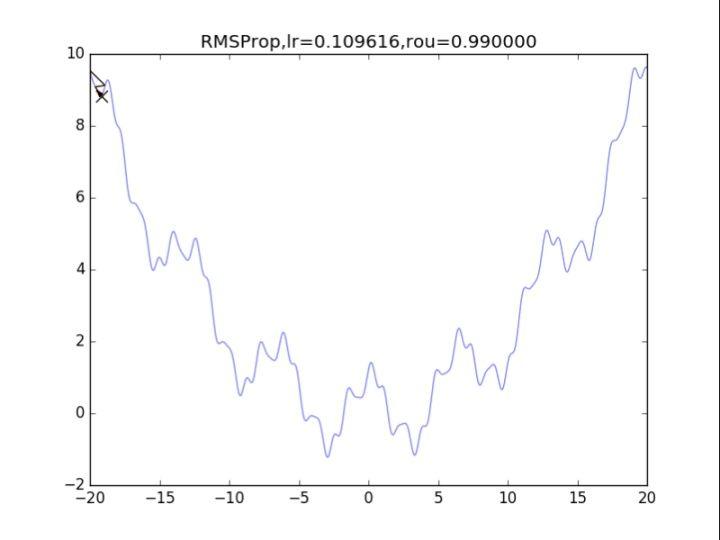 RMSProp,p=0.99
RMSProp,p=0.99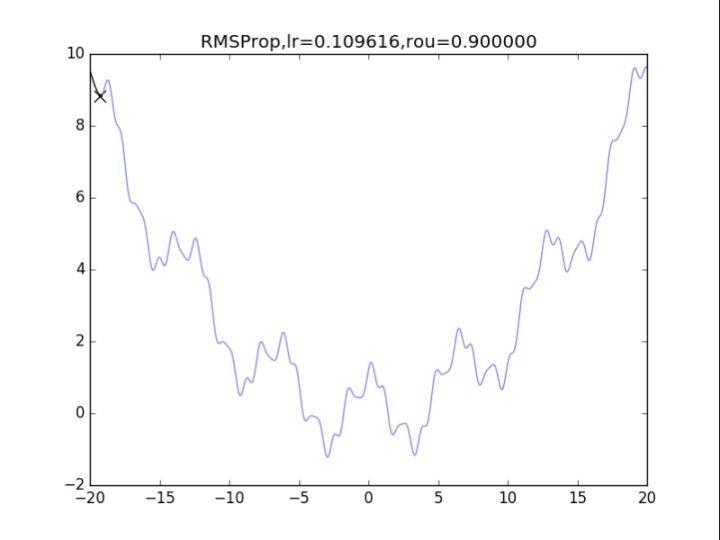 RMSProp,p=0.9
RMSProp,p=0.9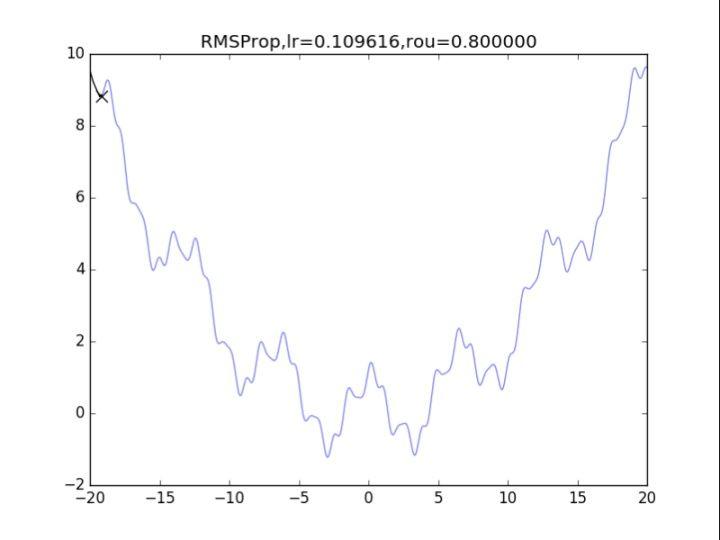 RMSProp,p=0.8
RMSProp,p=0.8
衰减速率情况复杂,建议自行调参.......
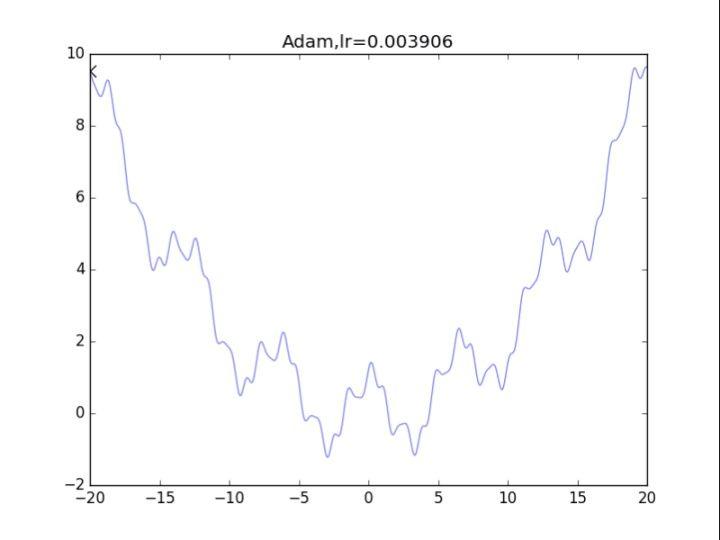
算法5:Adam算法
Adam算法和之前类似,也是自适应减少学习率的算法,不同的是它更新了一阶矩和二阶矩,用一阶矩有点像有动量的梯度下降,而用二阶矩来降低学习率。
此外还使用了类似于s = s / (1-p1^t)这样的公式,这样的公式在t较为小的时候会成倍增加s,从而让梯度更大,参数跑的更快,迅速接近期望点。而后续t比较大的时候,s = s / (1-p1^t)基本等效于s=s,没什么用。
算法如下:
给出学习率lr,delta=1e-8,衰减速率p1=0.9,p2=0.999
累计梯度r=0,初始x ,一阶矩s=0,二阶矩r=0
时间t = 0
while True:
t += 1
g = df/dx
s = p1*s + (1-p1) *g
r = p2*r +(1-p2)*g*g
s = s / (1-p1^t)
r = r / (1-p2^t)
x = x - lr / (delta+ sqrt(r)) * s
 Adam算法,鬼一样的表现
Adam算法,鬼一样的表现
是的,你没有看错,这玩意压根不收敛......,表现极差
在算法中仔细研究后才发现,是在t很小的前几步的时候,p2=0.999太大了,导致r = r / (1-p2^t) 中,1-p2^t接近0,r迅速爆炸,百步之内到了inf。后来修改p2=0.9后效果就好的多了
 Adam算法,神级表现
Adam算法,神级表现
最后还是Adam效果最好了 :),尽管学习率还是需要相当的调参
算法6:牛顿法
牛顿法是二阶近似方法的一种,其原理类似于将某函数展开到二次方(二次型)项:

如果幸运的话,这个展开式是一个开口向上的曲面,一步就走到这个曲面的最低点:

初始x
while True:
g = df(x) # 一阶导数
gg = ddf(x) # 二阶导数
x = x - g/gg # 走到曲面的最低点
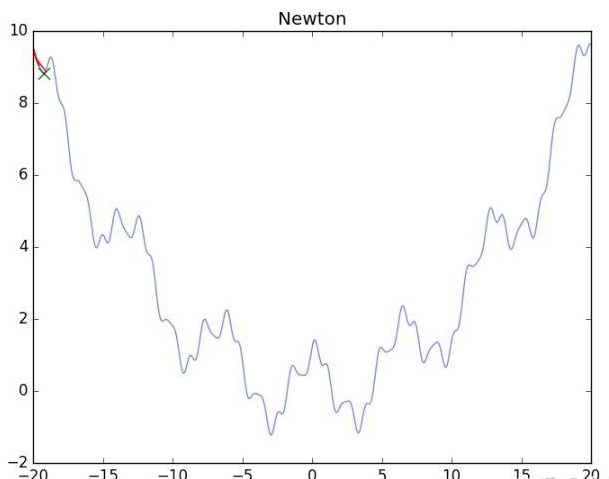 可怜的牛顿法,静态图
可怜的牛顿法,静态图
图片如上,看了真可怜........其实牛顿法要求的是H矩阵正定(一维情况下是二阶导数大于零),在多维中,这样的情况难以满足,大量出现的极小值,悬崖,鞍点都会造成影响,导致无法顺利进行下去,为了更好地进行牛顿法,我们需要正则化它。
算法7:牛顿法+正则化
牛顿法加上正则化可以避免卡在极小值处,其方法也很简单:更新公式改成如下即可

一维的算法如下:
初始x ,正则化强度alpha
while True:
g = df(x) # 一阶导数
gg = ddf(x) # 二阶导数
x = x - g/(gg+alpha) # 走到曲面的最低点效果图:
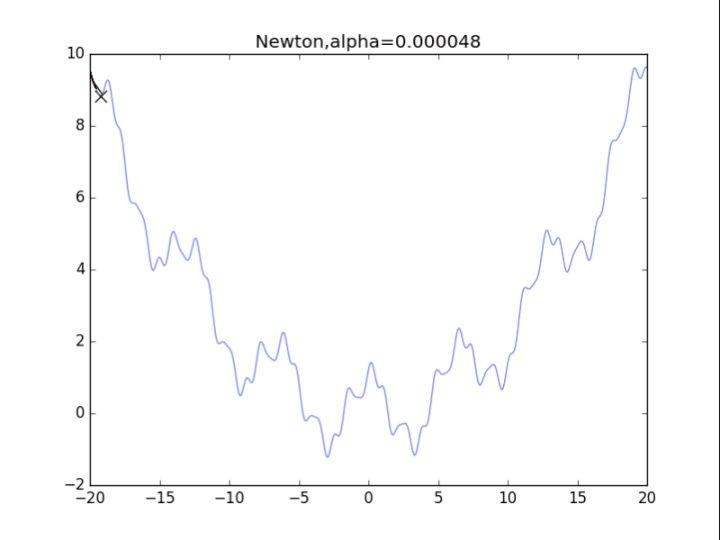 牛顿法+正则化
牛顿法+正则化
看了真可怜.........二次方法真心在非凸情况很糟糕。此外算法涉及H矩阵的逆,这需要O(n^3)的计算量,非深度学习可用。
代码:
本文系作者在时代Java发表,未经许可,不得转载。
如有侵权,请联系nowjava@qq.com删除。
编辑于

关注时代Java
关注时代Java