
如何实现替换直播背景?
与图像识别不同,AI 分析理解视频的技术门槛较高。长期以来,业界在视频 AI 技术的研究上鲜有重大突破。以 CVPR 会议难度最高的比赛之一 DAVIS( Densely Annotated Video Segmentation)为例,该比赛需要参赛团队精准处理复杂视频中物体快速运动、外观变化、遮挡等信息,过去几年,全球顶级科技在该比赛中的成绩从未突破 80 分,而达摩院的模型最终在 test-challenge 上取得了 84.1 的成绩。
DAVIS 的数据集经过精心挑选和标注,视频分割中比较难的点都有体现,比如:快速运动、遮挡、消失与重现、形变等。DAVIS 的数据分为 train(60 个视频序列), val(30 个视频序列),test-dev(30 个视频序列),test-challenge(30 个视频序列)。 其中 train 和 val 是可以下载的,且提供了每一帧的标注信息。对于半监督任务, test-dev 和 test-challenge,每一帧的 RGB 图片可以下载,且第一帧的标注信息也提供了。算法需要根据第一帧的标注 mask,来对后续帧进行分割。分割本身是 instance 级别的。
阿里达摩院:像素级视频分割
阿里达摩院提供了一种全新的空间约束方法,打破了传统 STM 方法缺乏时序性的瓶颈,可以让系统基于视频前一帧的画面预测目标物体下一帧的位置;此外,阿里还引入了语义分割中的精细化分割微调模块,大幅提高了分割的精细程度。最终,精准识别动态目标的轮廓边界,并且与背景进行分离,实现像素级目标分割。
基本框架
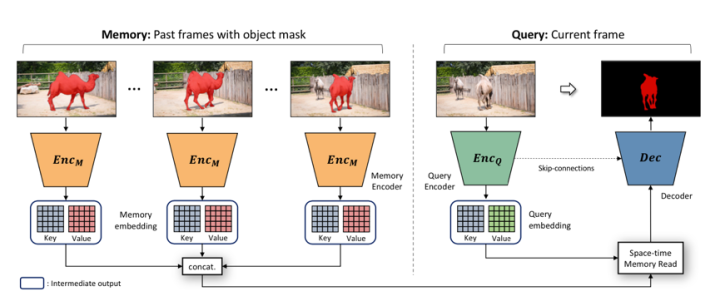
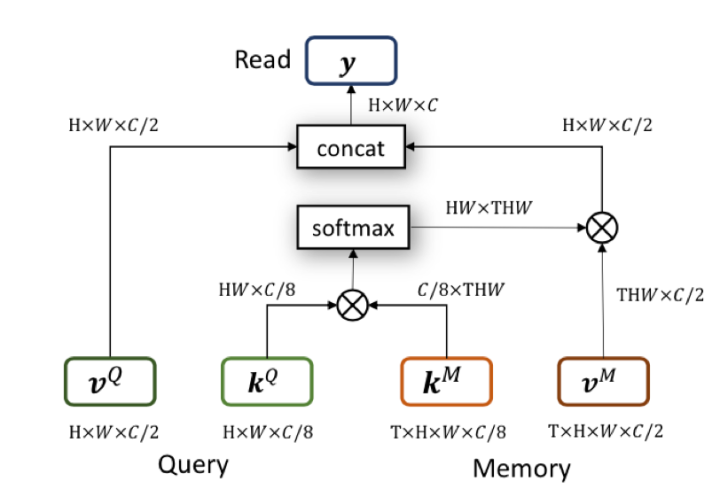
达摩院的算法基于去年 CVPR 的 STM 做了进一步改进。STM 的主要思想在于,对于历史帧,每一帧都编码为 key-value 形式的 feature。预测当前帧的时候,以当前帧的 key 去和历史帧的 key 做匹配。匹配的方式是 non-local 的。这种 non-local 的匹配,可以看做将当前 key,每个坐标上的 C 维特征,和历史每一帧在这个坐标上的 C 维特征做匹配。 匹配得到的结果,作为一个 soft 的 index,去读取历史 value 的信息。读取的特征和当前帧的 value 拼接起来,用于后续的预测。
三大技术创新
1. 空间约束
STM 的特征匹配方式,提供了一种空间上的长依赖, 类似于 Transformer 中,通过 self-attention 来做序列关联。这种机制,能够很好地处理物体运动、外观变化、遮挡等。但也有一个问题,就是缺乏时序性,缺少短时依赖。当某一帧突然出现和目标相似的物体时,容易产生误召回。在视频场景中,很多情况下,当前帧临近的几帧,对当前帧的影响要大于更早的帧。基于这一点,达摩院提出依靠前一帧结果,计算 attention 来约束当前帧目标预测的位置,相当于对短期依赖的建模。
具体的方法如下图所示:
- 当前帧的特征和前一帧的预测 mask 在 channel 维度上做 concat,得到 HxWx(c+1) 的特征;
- 通过卷积将特征压缩为 HxW;
- 用 sigmoid 函数将 HxW 的特征,压缩范围,作为空间 attention;
- 把 attention 乘到原特征上,作为空间约束。
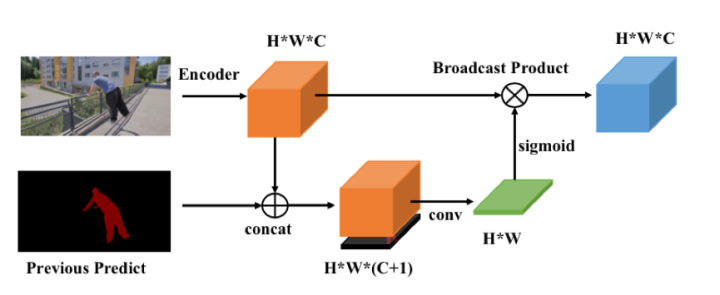
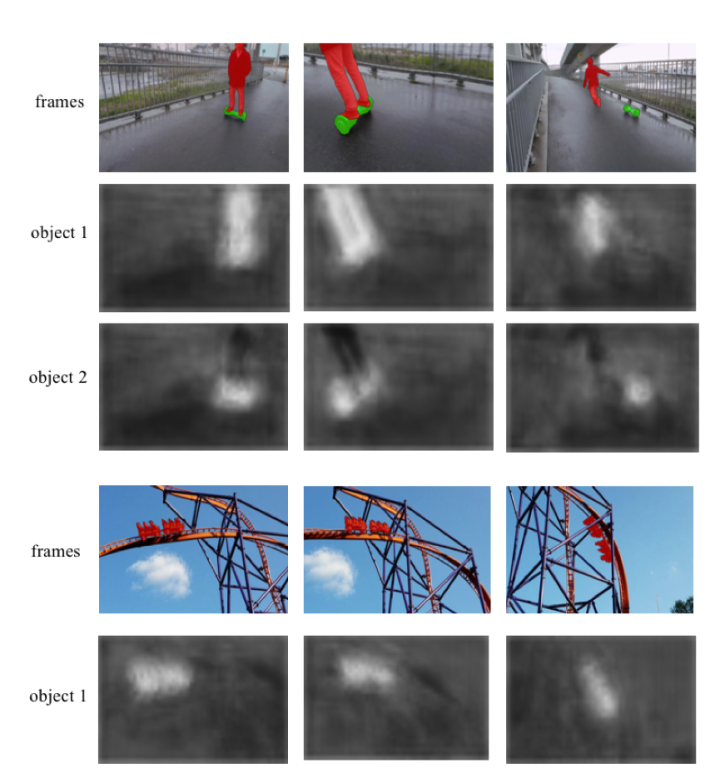
下图为空间 attention 的可视化结果,可以看到大致对应了前景的位置。
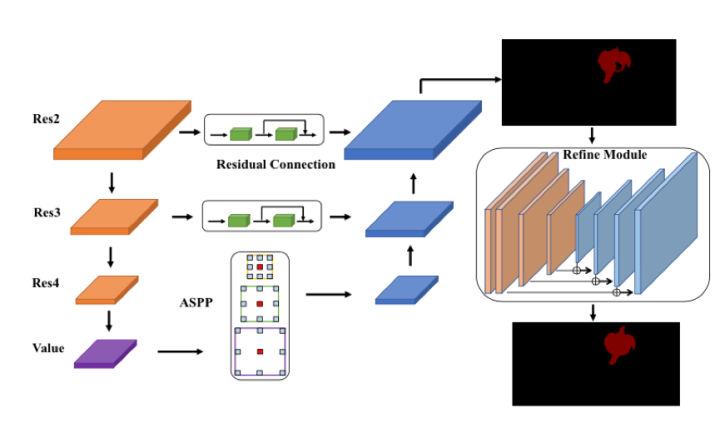
2. 增强 decoder
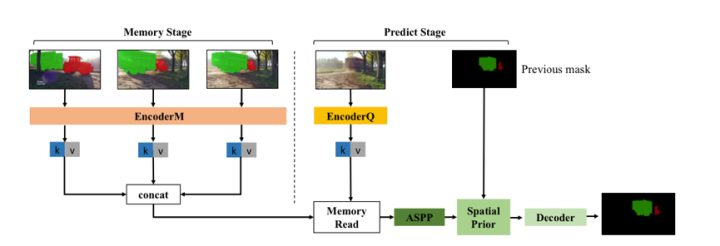
达摩院引入了语义分割中的感受野增强技术 ASPP 和精细化分割的微调(refinement)模块。ASPP 作用于 memory 读取后的特征,用于融合不同感受野的信息,提升对不同尺度物体的处理能力。
3. 训练策略
达摩院提出了一个简单但是有效的训练策略,减少了训练阶段和测试阶段存在的差异,提升了最终效果。
原始 STM 训练时,会随机从视频中采样 3 帧。这三帧之间的跳帧间隔,随着训练逐渐增大,目的是增强模型鲁棒性。但达摩院发现,这样会导致训练时和测试时不一致,因为测试时,是逐帧处理的。为此,在训练的最后阶段,达摩院将跳帧间隔重新减小,以保证和测试时一致。
其他
backbone: 达摩院使用了 ResNeST 这个比较新的 backbone,它可以无痛替换掉原 STM 的 resnet。在结果上有比较明显提升。
测试策略: 达摩院使用了多尺度测试和 model ensemble。不同尺度和不同 model 的结果,在最终预测的 map 上,做了简单的等权重平均。
显存优化: 达摩院做了一些显存优化方面的工作,使得 STM 在多目标模式下,可以支持大尺度的训练、测试,以及支持较大的 memory 容量。
本文系作者在时代Java发表,未经许可,不得转载。
如有侵权,请联系nowjava@qq.com删除。
编辑于

关注时代Java
关注时代Java